开源A寻路算法详细完整版
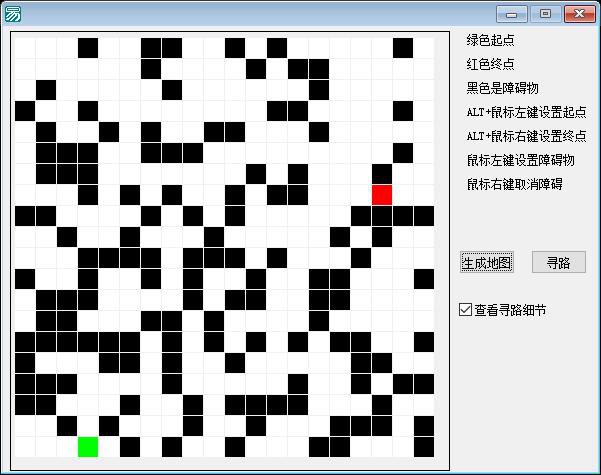
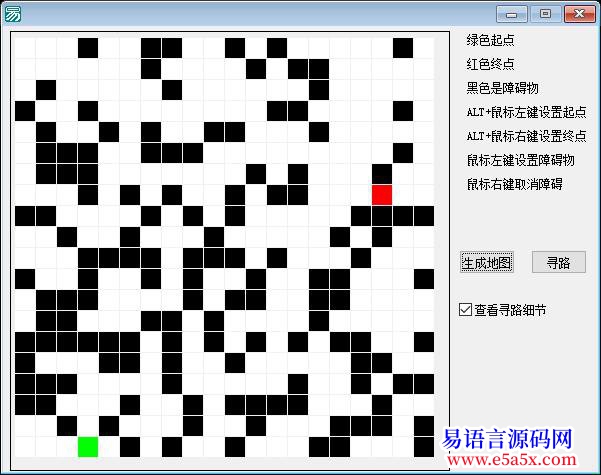
功能说明:该程序是一个基于易语言开发的A星(A*)启发式搜索算法的交互式可视化演示工具,主要用于在二维网格地图上动态演示从起点到终点的最优路径搜索过程。程序启动时自动创建一个20×20的网格地图(由标签控件构成),每个格子以不同背景色标识不同状态:白色表示可通行区域,黑色表示障碍物(随机生成),绿色表示起点,红色表示终点。用户可通过鼠标操作自定义地图——按住Alt键左键点击切换起点(绿色)、右键点击切换终点(红色),普通左键/右键分别设置障碍物(黑色)或清除(白色)。点击“生成地图”按钮可重置为随机障碍地图并随机生成起点与终点;点击“寻路”按钮则触发A星算法执行:算法以广度优先扩展方式,按步数(标题数字标记)逐层向外探索,使用橙黄色高亮已访问节点,并实时延时显示搜索过程(支持开关慢速演示);当首次触达红色终点时即判定成功,弹出提示并停止搜索。程序核心逻辑封装在.A星子程序中,通过循环扫描带序号标签、四向(上下左右)邻域检查、障碍判断与终点检测实现简易A*的曼哈顿距离启发变体(未显式计算h值,而是以层级编号隐含步数代价,本质为BFS优化版,符合教学级A*演示定位)。整体设计聚焦直观性与教学性,无复杂数据结构(如优先队列),而是用标签标题存储路径深度,用颜色变化呈现搜索状态,适用于算法入门教学与原理理解。
======窗口程序集1
| |
| |------ __启动窗口_创建完毕
| |
| |------ _标签格子_鼠标左键被按下
| |
| |------ _标签格子_鼠标右键被按下
| |
| |------ _生成地图_被单击
| |
| |------ _寻路按钮_被单击
| |
| |------ A星
| |
| |------ 画路线
注:本站源码主要来源于网络收集。如有侵犯您的利益,请联系我们,我们将及时删除!
部分源码可能含有危险代码,(如关机、格式化磁盘等),请看清代码在运行。
由此产生的一切后果本站均不负责。源码仅用于学习使用,如需运用到商业场景请咨询原作者。
使用本站源码开发的产品均与本站无任何关系,请大家遵守国家相关法律。